轻量级机器人仿真器 IR-SIM:快速算法验证工具
IR-SIM 是一款基于 Python 的轻量级机器人仿真器,专注于导航、控制和强化学习的快速算法验证。它不依赖复杂物理引擎,通过 YAML 定义场景和 Matplotlib 可视化,简化了算法原型设计流程。
在机器人技术、自动驾驶和人工智能的研究与开发中,仿真器扮演着至关重要的角色。它允许开发者在进入成本高昂的实体测试前,对算法进行安全、高效的验证。然而,许多功能强大的工业级仿真器往往结构复杂、依赖众多,学习曲线陡峭,并不适合快速迭代和概念验证。因此,一个轻量级、易于上手的仿真工具对于算法原型设计阶段具有显著价值。
Intelligent Robot Simulator (IR-SIM) 正是为此类需求而设计的一款基于 Python 的轻量级机器人仿真器。其核心定位是服务于导航、运动控制以及强化学习等领域的快速算法验证,而非追求高保真的物理模拟。与依赖复杂物理引擎的仿真平台不同,IR-SIM 的设计哲学是简化工具链,聚焦核心算法逻辑的测试。
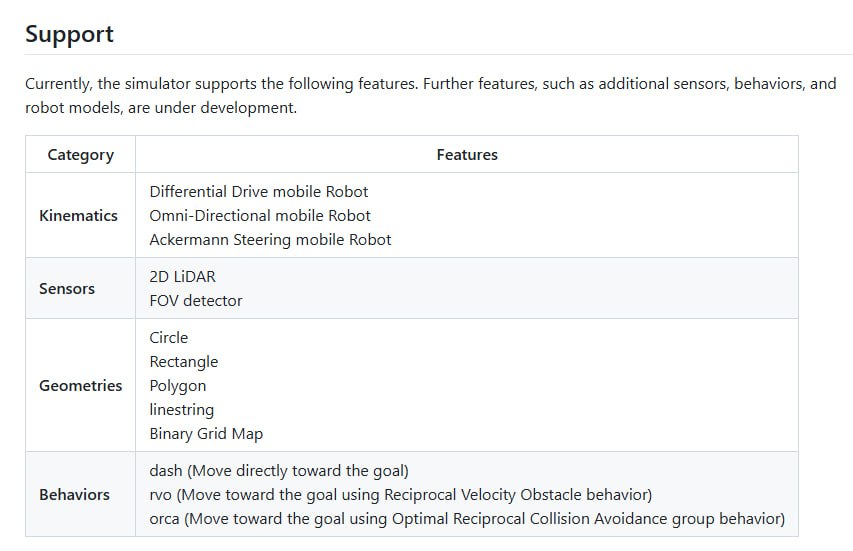
IR-SIM 具备多项旨在提升开发效率的特性。其安装和配置过程简单快捷,降低了入门门槛。仿真场景通过 YAML 文件进行定义和管理,使得环境构建和修改变得直观。它利用 Matplotlib 库实现算法的实时可视化,方便开发者即时观察机器人行为。工具内置了碰撞检测功能,并支持多机器人环境下的避障测试。这些特性使其能够很好地融入人工智能与强化学习的标准开发流程,支持对多机器人协同避障、基于激光雷达的导航策略以及在动态障碍物环境中的行为进行快速原型设计。研究者可以在投入更庞大、更复杂的仿真平台(如 Gazebo)之前,利用 IR-SIM 完成算法的高层次逻辑验证。
IR-SIM 的价值在于其在效率与灵活性之间取得的平衡。作为一个开源且活跃维护的项目,它已被多篇导航与路径规划领域的学术论文所采用,证明了其在科研社区的实用性。对于学生、研究人员以及机器人导航算法爱好者而言,IR-SIM 提供了一种无需处理庞大依赖和复杂配置,即可快速试验和验证新想法的途径。这种简化工具链、聚焦核心需求的设计思路,有助于加速从算法构思到初步验证的创新过程。





